射出成形後の二次加工を自動化する方法
人間の手による作業は複雑なことも可能です。しかし、それが連続作業ともなると、長時間になればなるほど、その正確さを欠いてきます。
そこで、少し複雑な連続作業をロボットにさせることで省人化を行いましょう。その時に便利なのが取り出しロボットの「姿勢制御のサーボ駆動動作」です。±0.1mの数値制御によるサーボ駆動は、人間の手の様にシビアな角度が必要な作業を連続で正確に素早く行うことが可能です。
『姿勢サーボ機を使った具体事例』ダウンロード資料
チャック交換、製品開放時のレイアウトや二次加工機連動等、生産工程の自動化に「姿勢制御のサーボ駆動動作」が成形工場の省人化にお役に立ちます。
ダウンロード資料もぜひご活用ください。

姿勢サーボ機構の特長
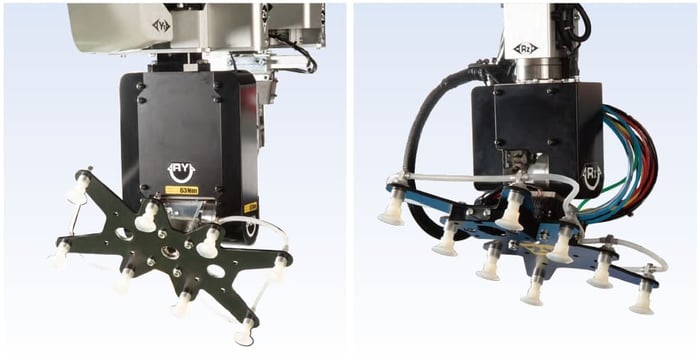
水平・垂直及び旋回をサーボ駆動にて制御することにより、特殊形状製品における取り出しやアンダーカット、またカメラ検査やストック、ゲートカット等の二次工程との連動を飛躍的に効率アップできます。
効率アップする二次工程業務
- 特殊形状製品における取り出し
- アンダーカット
- カメラ検査
- ストック、ゲートカット等
姿勢サーボ動作
Ryタイプ
水平動作+垂直旋回の2軸姿勢サーボ
Rzタイプ
水平動作+水平旋回の2軸姿勢サーボ
動画で見る取出ロボットの姿勢動作
- 製品取り出し後、90度回転してゲートニッパにアプローチ
- 製品開放時とゲート開放時の角度を自在に変更
- 軸を180度回転させチャック板交換
- 45度に角度を変えて製品開放
- その他、自在な動作が可能なため、製品組み立て・カメラ検査・ゲートカットなどにも対応
姿勢制御のサーボ駆動動作の使用具体事例
効果01 ニッパ使用数が4個から1個にコストダウン
段取り時間も半減 ニッパカット時にゲートにブレードが入りにくい角度の場合、姿勢サーボで角度を調整してゲートカットしやすくする。
効果02 待機ニッパの位置調整の段取り時間を30分→15分に短縮
LRのセット取りの場合、ゲートカットした後のLRキャビ分けに姿勢サーボを使って各コンテナに振り分ける。
効果03 コンテナ内スペースの有効利用ができて一箱の製品員数が2倍に
長手方向の製品をコンベヤまたはコンテナに置くときに、 垂直反転させて置きやすくする。 また段積みで角度を変えて置く。 形状によっては180度変えて交互に置く。
効果04 目視で裏面ショートを作業者が専属で見ていたが自動化して省人化できた
製品取り出し後のカメラ検査において、角度を変えてカメラから視認しやすいようにする。
効果05 刻印を作業者が専属でしていたが自動化して省人化できた
製品取り出し後のレーザーによる刻印のために、レーザーから照射しやすい位置に向ける。
効果06 ワーク供給時、作業者が専属でいたが自動化して成形機担当1台→2台に増やせた
インサート成形において、 パーツフィーダーなどのワーク供給機からの受け取った時の角度を反転させてインサートしやすいようにする またインサートする角度も調整する。
効果07 組み立てを作業者が専属でしていたが自動化して省人化できた
中板挿入しての組み立てなどの簡易組み立てに姿勢サーボを使う。
『姿勢サーボ機を使った具体事例』ダウンロード資料
チャック交換、製品開放時のレイアウトや二次加工機連動等、生産工程の自動化に「姿勢制御のサーボ駆動動作」がお役に立ちます。ダウンロード資料もぜひご活用ください。

省人化・自動化の関連コンテンツ
- 射出成形の人手不足解消について|射出成形よくある質問
- 射出成形の自動化について|射出成形よくある質問
-
動画で見る|取り出しロボットと成形周辺機器のトータルリンクによる「良品」「不良品」の自動仕分け
- 動画で見る|成形品の自動ゲートカット
- 動画で見る|成形品ストック・搬送時の人手不足を解消する自動ストッカー
-
動画で解説06|ロボットが成形終了後の作業を自動指示|作業自動化で省人化とコスト削減
- 射出成形工程・工場の省人化|事例記事とダウンロード資料のまとめ
- 取出タイム2.1秒→0.8秒に62%短縮。サーボ駆動ロボットで射出成形の生産性アップ
-
コロナ禍の人手不足に負けない!成形品自動ストッカーで24時間安定生産
-
樹脂成形品1万個の包装が40秒で可能に。射出成形品の自動包装で、袋詰め工程の省人化と精度向上
-
射出成形とは|基礎知識と課題解決
省人化についてお問い合わせください
チャック交換、製品開放時のレイアウトや二次加工機連動等、生産工程の自動化に「姿勢制御のサーボ駆動動作」がお役に立ちます。
工場省人化に課題をお持ちの企業様はお気軽にお問い合わせください。